
2012 robot design
2 posters
Page 1 of 1

2012 robot design
![]() kenneth Sun Jan 15, 2012 9:59 pm
kenneth Sun Jan 15, 2012 9:59 pm
Here is the robot so far.
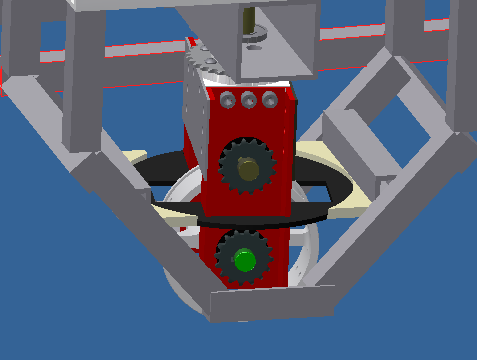
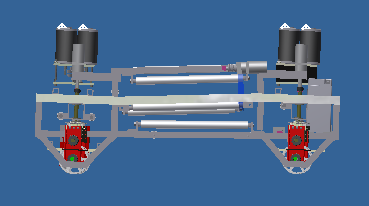
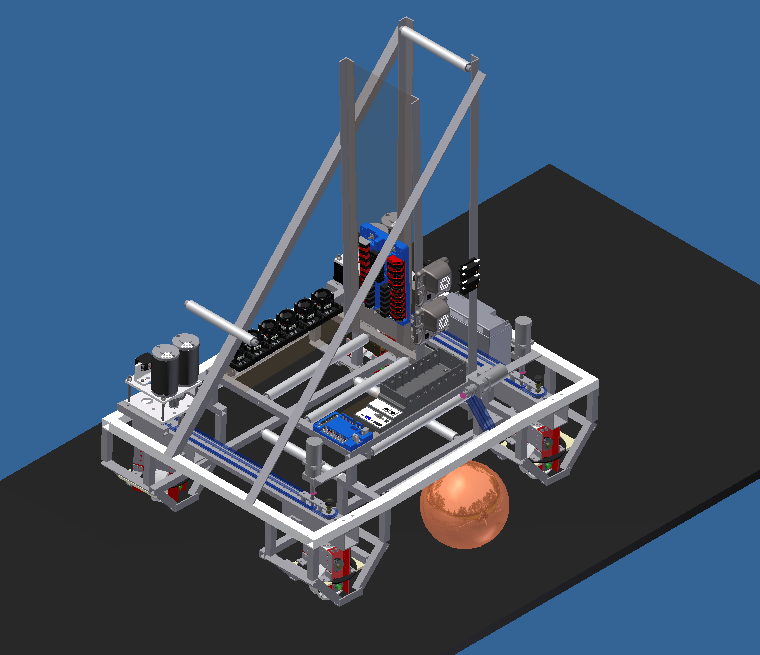
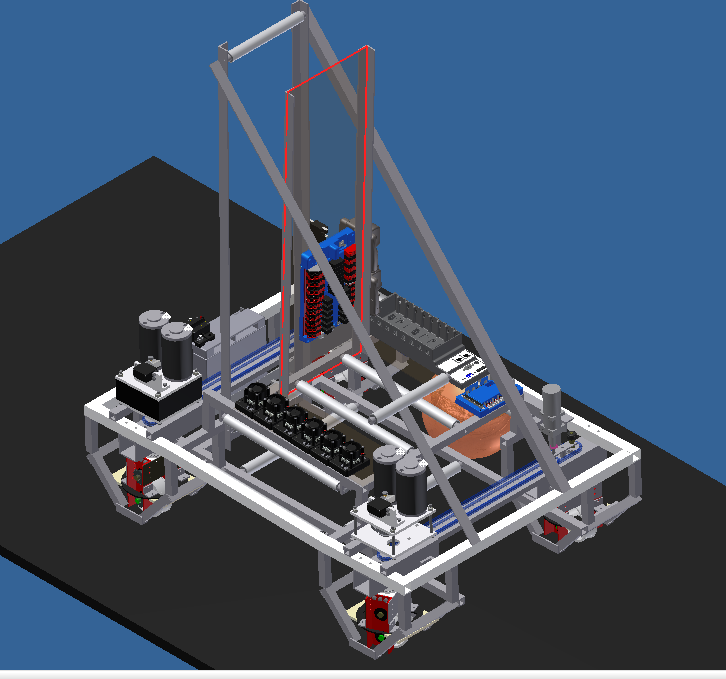
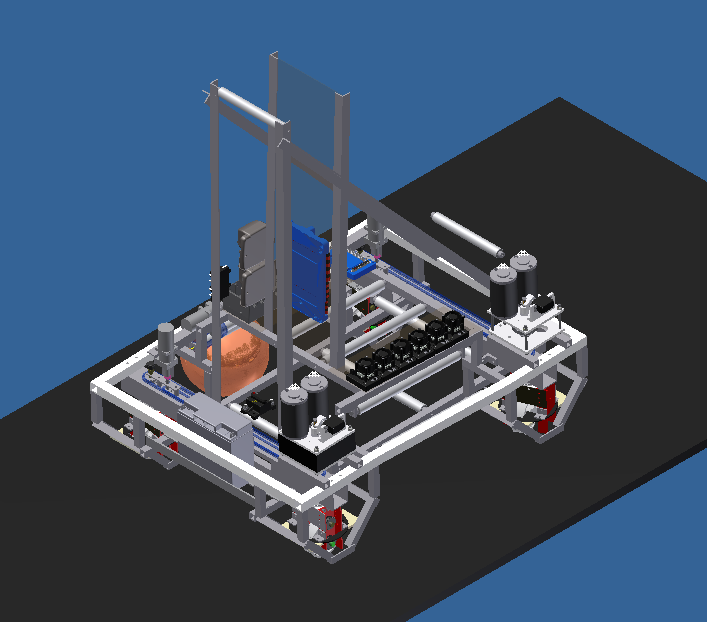
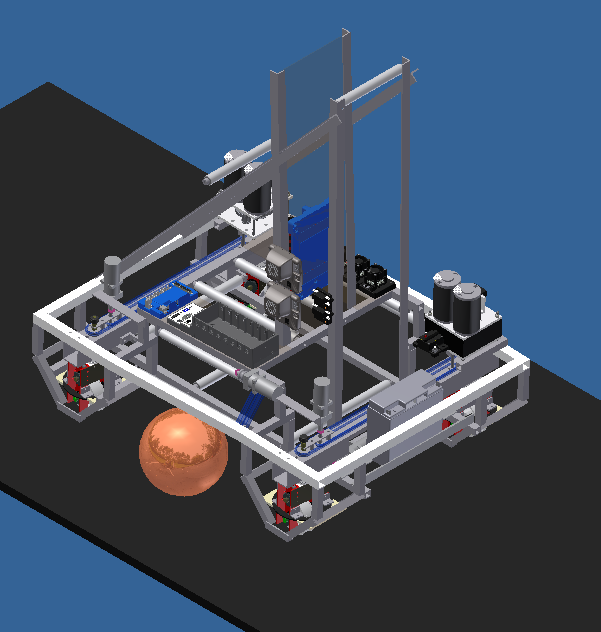
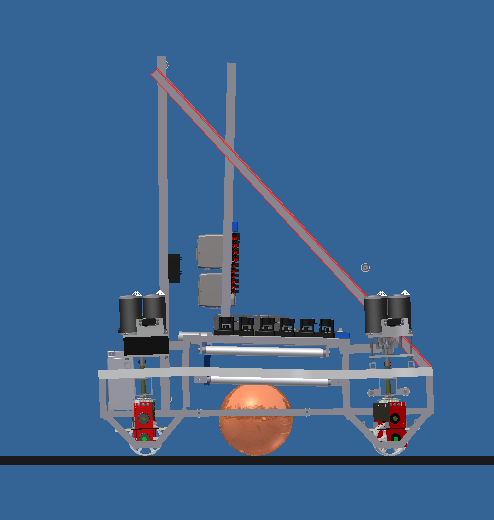


Total weight so far is 74lbs without a shooter, wiring, and belts.
The drivetrain is completed in the drawings and the structure is on its way. The shooter prototype tested today was very promising, crushing the ball to 4" gave us the best shot. Here is a video of the test: https://youtu.be/I28L3T8LTj4
The balls were bouncing off a hot water pipe, hitting consistently each time.
Total weight so far is 74lbs without a shooter, wiring, and belts.
The drivetrain is completed in the drawings and the structure is on its way. The shooter prototype tested today was very promising, crushing the ball to 4" gave us the best shot. Here is a video of the test: https://youtu.be/I28L3T8LTj4
The balls were bouncing off a hot water pipe, hitting consistently each time.

kenneth- Posts : 153
Join date : 2010-09-30
Gear ratio
![]() David Smith Wed Nov 28, 2012 12:02 am
David Smith Wed Nov 28, 2012 12:02 am
Ken what did we do to the super shifter gear boxes to get the ratio we now have?
Do you know high and low ratios.
If, and a big if we were to build the same drive how would you accomplish a slower drive ratio.
We were way to fast.
One more question.
Can you think of anyway to have the wheels turn (steer) a different amount using only one steering motor.
A car has the inside wheel turn more degrees then the outside because of the difference in circumference the wheels travel while turning.
I was trying to figure out mounting the steering sprockets off center but the chain would get loose and then tight.
We would need a spring tensioner.
Put your engineer hat on and try to come up with a way.
The caster we had did not do a good enough job.
More degrees might help.
Do you know high and low ratios.
If, and a big if we were to build the same drive how would you accomplish a slower drive ratio.
We were way to fast.
One more question.
Can you think of anyway to have the wheels turn (steer) a different amount using only one steering motor.
A car has the inside wheel turn more degrees then the outside because of the difference in circumference the wheels travel while turning.
I was trying to figure out mounting the steering sprockets off center but the chain would get loose and then tight.
We would need a spring tensioner.
Put your engineer hat on and try to come up with a way.
The caster we had did not do a good enough job.
More degrees might help.
David Smith- Posts : 145
Join date : 2010-10-13
Steering
![]() David Smith Wed Nov 28, 2012 1:17 am
David Smith Wed Nov 28, 2012 1:17 am
Forget the steering quetion .
I have thought some more and realize you could not stafe sideways and the wheel angle needs to be 45 degrees on all 4 corners to do a 360 turn.
Impossible to do it all with just 2 steering motors. There need to be a compromise.
I have thought some more and realize you could not stafe sideways and the wheel angle needs to be 45 degrees on all 4 corners to do a 360 turn.
Impossible to do it all with just 2 steering motors. There need to be a compromise.
David Smith- Posts : 145
Join date : 2010-10-13
Re: 2012 robot design
![]() kenneth Wed Nov 28, 2012 2:10 am
kenneth Wed Nov 28, 2012 2:10 am
A slower speed could be achieved with changing the gears on the shifting and intermediate shafts. Currently they are the highest possible ratios and we removed the final stage of reduction.
The steering geometry could be accomplished with solid linkages instead of chain, ie: using a pitman arm and associated linkages. It would compromise the strafing.
The 2012 drive was much more complicated than the 2011 drive system, and there were oversights in the design resulting in lots of rework. I would recommend going to the revised 2011 swerve drive because it has fewer points of failure, it's simpler, and is much more robust. Also, the revised modules consist of off the shelf andymark gears on a hex shaft for the stacked gear set, removing what was previously the most complex component. Furthermore, there are new speed controllers which are capable of 60 amps continuous and 100 amps peak which have been approved for the 2013 season, which may render 2 speeds unnecessary.
Instead of adding more caster, I believe a better method of turning on the spot similar to a tank drive could be achieved with individually driven modules like this:

This could not be done with the 2012 system because 2 wheels are driven together, but the steering mode is basically the same as aiming with 2 more motors turning. This could be tested on the 2011 robot if the programmers have time, but I see no reason as to why this wouldn't work better compared to turning in monster.
In all, swerve should only be considered if the field is relatively flat and maneuverability is an asset.
The steering geometry could be accomplished with solid linkages instead of chain, ie: using a pitman arm and associated linkages. It would compromise the strafing.
The 2012 drive was much more complicated than the 2011 drive system, and there were oversights in the design resulting in lots of rework. I would recommend going to the revised 2011 swerve drive because it has fewer points of failure, it's simpler, and is much more robust. Also, the revised modules consist of off the shelf andymark gears on a hex shaft for the stacked gear set, removing what was previously the most complex component. Furthermore, there are new speed controllers which are capable of 60 amps continuous and 100 amps peak which have been approved for the 2013 season, which may render 2 speeds unnecessary.
Instead of adding more caster, I believe a better method of turning on the spot similar to a tank drive could be achieved with individually driven modules like this:
This could not be done with the 2012 system because 2 wheels are driven together, but the steering mode is basically the same as aiming with 2 more motors turning. This could be tested on the 2011 robot if the programmers have time, but I see no reason as to why this wouldn't work better compared to turning in monster.
In all, swerve should only be considered if the field is relatively flat and maneuverability is an asset.
kenneth- Posts : 153
Join date : 2010-09-30
Re: 2012 robot design
![]() kenneth Wed Nov 28, 2012 2:24 am
kenneth Wed Nov 28, 2012 2:24 am
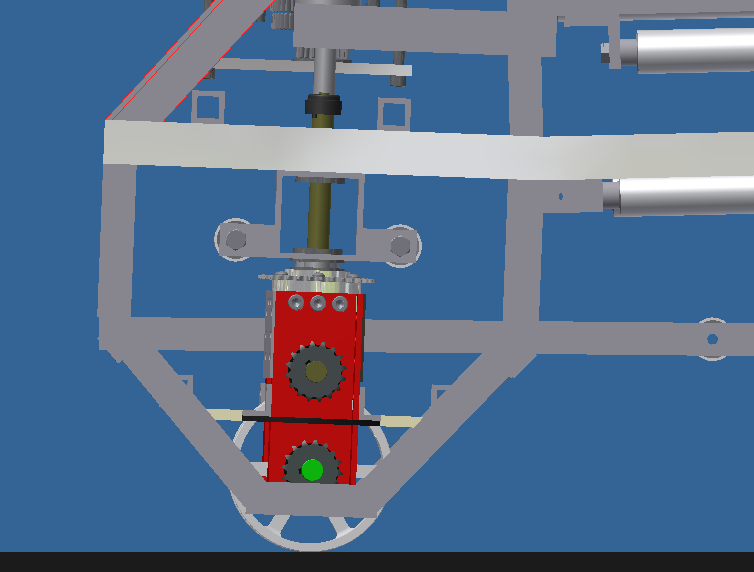
One more thing about the 2012 system was the precision of the parts required due to mitre gears. The width of the bearing blocks and the sideplate squareness relative to the top plate was crucial.
kenneth- Posts : 153
Join date : 2010-09-30
» Climbing the pyramid
» 2011 design
» Back Roll Pick Up
» Robot Chassis/Overall Design
» Learning CAD and Design Workflow
» 2011 design
» Back Roll Pick Up
» Robot Chassis/Overall Design
» Learning CAD and Design Workflow
Page 1 of 1
Permissions in this forum:
You cannot reply to topics in this forum|
|
|